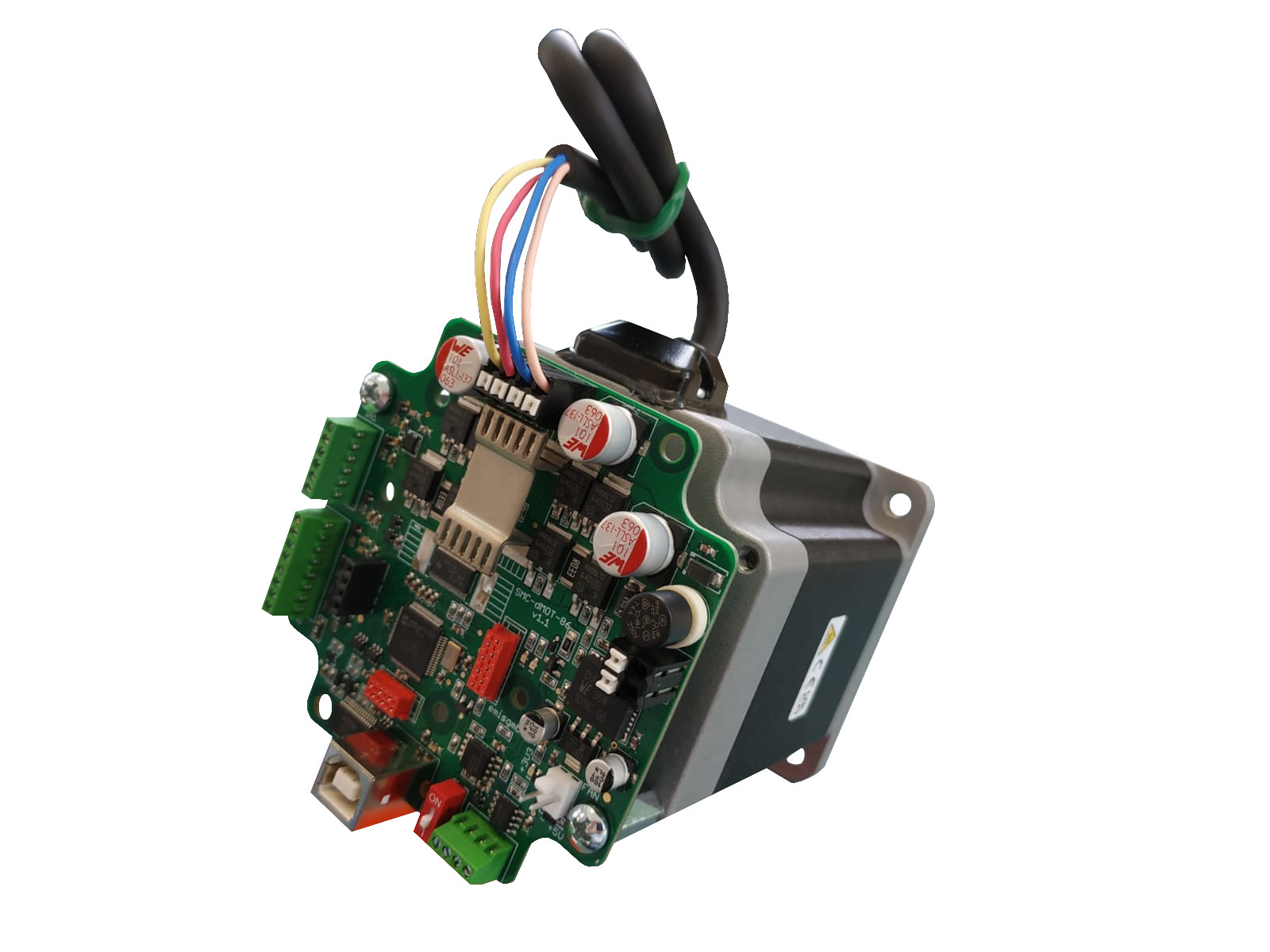

Beschreibung
• Schrittmotor bis max. 4A Phasenstrom steuerbar
• Schrittauflösung 1, 2, 4, 8, 16, 32, 64, 128, 256 Mikroschritte pro Vollschritt
• Anschluss für 1 Referenzschalter (Typ: Schließer, Öffner, PNP)
• USB-Anschluss 2.0 (Typ B) für PC
• 10 digitale Eingänge
• 2 digitale Ausgänge
• 32 MBit – Festwertspeicher für eigene Programme
• Geeignet für Standalone-Anwendungen (Betrieb ohne PC)
• Schnittstelle für externes Kommunikationsinterface (Bluetooth) in Vorbereitung
• Nur eine Stromversorgung für Logik und Schrittmoren notwendig
• Firmware mit Downloadmanager aktualisierbar (zukunftssicher)
• Kundenwünsche realisierbar
Die Schrittmotorsteuerung SMC-dMOT-86 kann Schrittmotoren mit Phasenströmen von
bis zu 4A steuern. Die Motorenstufe arbeitet nach dem bipolaren Stromchopperver-
fahren. Es können bipolare Schrittmotoren mit zwei oder vier Phasen (mit entspre-
chender Verschaltung) angeschlossen werden.
Als Stromversorgung wird ein Gleichspannungsnetzteil mit einer Spannung von mindes-
tens 12V DC bis maximal 48V DC benötigt. Der erforderliche Strom hängt vom ein-
gestellten Phasenstrom ab. Im Bedarfsfall helfen wir bei der Dimensionierung gerne
weiter.
Die Kommunikation zwischen PC und SMC-dMOT-86 erfolgt über USB (Typ B). Nach
erstmaligem Einstecken des USB-Kabels wird auf dem PC ein virtueller COM-Port
erzeugt und eine COM-Port-Nr. zugewiesen. Über diesen virtuellen COM-Port finden
sämtliche Datentransfers zwischen PC und SMC-dMOT-86 statt. Eine RS485-Schnitt-
stelle ist vorhanden, wird in der Firmware allerdings noch nicht unterstützt. Die Unter-
stützung wird in künftigen Versionen erfolgen.
Der USB-Treiber kann von unserer Homepage unter www.emisgmbh.de/downloads-trei-
ber/ oder direkt vom Hersteller des USB-UART-Umsetzers, FTDI, unter www.ftdi-
chip.com/Drivers/VCP.htm, abgerufen werden. Zur Ansteuerung der SMC-dMOT-86
kann ein Terminal-Programm verwendet werden. In absehbarer Zeit werden wir auf
unserer Homepage ein Anwenderprogramm zum Download zur Verfügung stellen.
Programme für den Standalone-Betrieb können mit unserer kostenlosen Software
„StandAlone-ProgrammWriter-2d0“ in den Festwertspeicher geladen werden.
Den digitalen Eingängen können Schalt- bzw. Steuersignale mit einem Pegel von
0 – 24V DC zugeführt werden.
Am vorgesehenen Eingang kann ein Referenzschalter angeschlossen werden. Damit
kann das System zu einer definierten Nullposition gebracht werden.
Sofern der Enable-Eingang über die Software aktiviert wird, kann hier eine NOT-AUS-
Linie (Öffner) angeschlossen werden. Dann muss an diesem Eingang ein positiver
Pegel anliegen (+5V bis +24V), damit die Motorendstufe für Drehbewegungen freigeben
wird. Wird der NOT-AUS-Schalter während einer Motorbewegung getroffen, stoppt die
Drehbewegung sofort und die Fehleranzeige blinkt. Dieser Zustand kann nur mit einer
Quittierung (positiver Pegel für mindestens 100 ms an Eingang 8) verlassen werden.
Soll nach der Quittierung eine automatische Referenzfahrt erfolgen, kann das mit einem
bereits vorher platzierten Kommando (Befehlsreferenz 10.17) eingestellt werden. Soll
die Quittierung nach einem Fehlerfall automatisch erfolgen, muss am Eingang 8 ein
Dauerpegel (+5V bis +24V) angelegt werden.
Es stehen zwei Transistorausgänge mit max. 24V DC Spannung und 100 mA Laststrom
zur Verfügung. Werden höhere Leistungen benötigt, sind entsprechende Maßnahmen
außerhalb der SMC-dMOT-86 zu treffen. Die Schaltspannung wird der SMC-dMOT-86
an der Klemmleiste von extern zugeführt. Damit ist es möglich die Ausgänge an ver-
schiedene Logiken anzupassen (TTL, CMOS, SPS). Die Befehle zum Schalten der Aus-
gänge sind in „Befehlsreferenz 10.3“ beschrieben.
Für Standalone-Anwendungen steht ein Festwertspeicher für 10 flankengetriggerte Pro-
gramme mit jeweils 32 kB zur Verfügung. Diese Programme können den Eingängen 3
bis 7 (jeweils 1 Programm für die positive Flanke und 1 Programm für die negative
Flanke) zugewiesen werden. Mehr hierzu können Sie der Beschreibung „Standalone-
Betrieb“ unter Punkt 9 entnehmen.
| Technische Daten: | |
| Spannungsversorgung: | 12V…48V DC |
| Stromaufnahme: | Ohne Motor 30mA bei 24V DC |
| Zulässige Umgebungstemperatur: | 0°C…+40°C |
| Zulässige Luftfeuchtigkeit: | Max. 85% (nicht kondensierend) |
| Digitale Eingänge: | 10 (High: +5V…+24V, Low: 0V…+0,8V) |
| Digitale Ausgänge: | 2 (+5V…+24V, max. 100mA) |
| Kommunikationsinterface: | USB2.0 (Typ B), RS485, Bluetooth |
| Anzahl der Motoranschlüsse: | 1 Stück, bipolarer Schrittmotor, 2 Phasen |
| Maximaler Phasenstrom: | 4A (100%) |
| Automatische Ruhestromreduzierung: | Einstellbar 0% bis 25% von 4A |
| Schrittauflösung: | 1/1, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256 |
| Anschlüsse für Referenzschalter: | 1 mechanischer oder elektronischer Schließer |
| Festwertspeicher: | On Board 32 MBit |
| Abmessungen: | 86mm x 86mm |
Infomaterial:
Datenblatt Schrittmotor SM2862-5055




Rezensionen
Es gibt noch keine Rezensionen.